Di robot a quattro zampe ormai ce ne sono a iosa, ma molti di questi hanno un limite: la mancanza della colonna vertebrale. In genere non viene inserita perché troppo complessa a livello ingegneristico, e molte aziende puntano alla semplicità. Non è il caso di NeRmo, il primo topo robot dotato di spina dorsale completa.
Essendo ancora nelle fasi iniziali, i ricercatori ritengono che saranno necessarie ulteriori modifiche e integrazioni. Ma è indubbio che i sistemi spinali nei futuri robot quadrupedi potrebbero migliorare notevolmente la loro funzionalità.
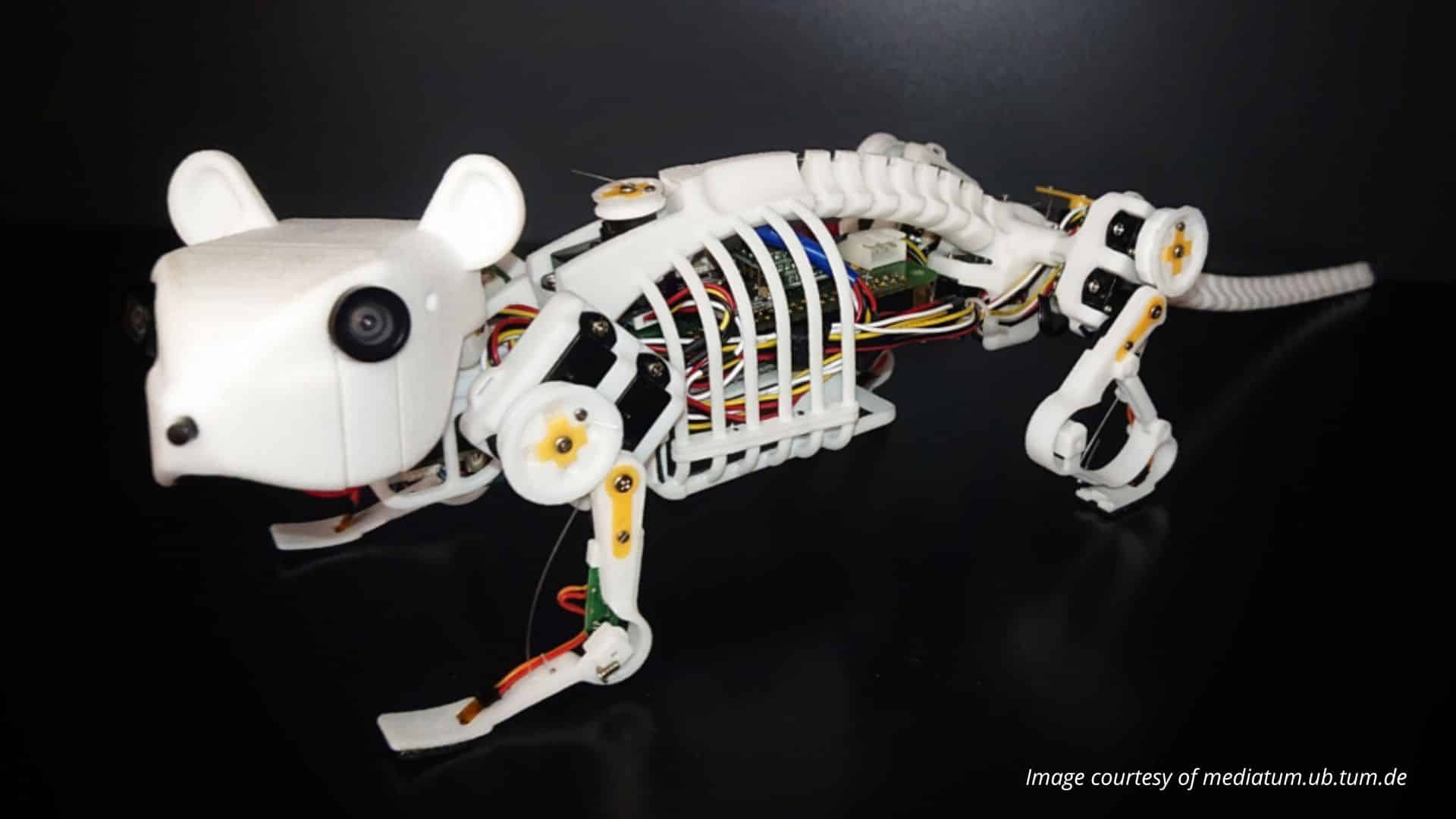
NeRmo, il robot completo di spina dorsale da topo
Robot a quattro zampe come Spot di Boston Dynamics e Cheetah devono quasi tutta la loro agilità a giochi di gambe fantasiosi. Ma le loro “ispirazioni” anatomiche si fermano in gran parte alle loro gambe.
In biologia, tuttavia, il movimento, la flessibilità e le complesse funzioni motorie di un animale quadrupede derivano quasi interamente dalla sua colonna vertebrale.
Replicare quel complesso sistema di vertebre sovrapposte nei robot è molto più difficile delle gambe, ma se le spine artificiali potessero essere integrate in tali progetti, gli ingegneri potrebbero aprire nuove possibilità.
E così sembra guardando NeRmo, un robot biomimetico a quattro zampe che si basa su una nuova struttura motorio-tendinea, per muoversi rapidamente negli ambienti.
Progettato da alcuni ricercatori dell’Università Tecnica di Monaco, dell’Università della Tecnologia di Norimberga e dell’Università cinese Sun Yat-Sen, questo robot, ispirato ai roditori, rispecchia il sistema scheletrico di un topo.
Come funziona la sua colonna vertebrale
Come riportato sull’articolo pubblicato su Science Robotics, la metà anteriore rigida del robot ospita i suoi sistemi elettronici, mentre la seconda metà funziona in modo molto simile a una vera colonna vertebrale flessibile, con quattro articolazioni lombari e laterali.
Vedendo anche questo video su YouTube, i tendini artificiali attraversano la colonna vertebrale, e le articolazioni del gomito e del ginocchio del robot consentono a NeRmo movimenti ancora più simili a quelli di un topo, insieme a tempi di rotazione più rapidi.
Per testare il nuovo design, il team ha eseguito NeRmo attraverso una serie di quattro esperimenti per dimostrare l’equilibrio statico, la camminata in linea retta, la svolta agile e la navigazione nel labirinto. Ciascuna prova prevedeva due opzioni: una con il sistema spinale impegnato e l’altra con il sistema spinale disabilitato.
In generale, NeRmo ha svolto i propri compiti meglio, più velocemente e con maggiore precisione quando ha integrato la colonna vertebrale nei suoi movimenti. Nel caso della navigazione nel labirinto, con la spina dorsale impegnata, il topo robot ha completato il suo labirinto correndo in media il 30% più velocemente di quanto avrebbe fatto semplicemente camminando senza supporto spinale.
Se vuoi saperne di più su questa ricerca, ti consiglio di approfondire al meglio leggendo l’articolo originale pubblicato su Science Robotics:
- Zhenshan Bing, Alex Rohregger, Florian Walter, Yuhong Huang, Peer Lucas, Fabrice O Morin, Kai Huang, Alois Knoll, “Lateral flexion of a compliant spine improves motor performance in a bioinspired mouse robot”, Science Robotics, DOI: 10.1126/scirobotics.adg7165.

