Il mondo della robotica ha raggiunto un nuovo traguardo con X1, il primo sistema multirobot al mondo che integra un robot umanoide con un drone trasformabile. Questa innovazione permette al robot di camminare, lanciare il drone dalla propria schiena, farlo volare, guidare su ruote e adattarsi a ostacoli complessi, aprendo scenari fino a poco tempo fa impensabili per le operazioni autonome.
Una collaborazione internazionale per la robotica multimodale
X1 è il risultato di tre anni di collaborazione tra il Caltech’s Center for Autonomous Systems and Technologies (CAST) e il Technology Innovation Institute (TII) di Abu Dhabi, negli Emirati Arabi Uniti. L’obiettivo dei due centri è combinare competenze di alto livello in sistemi autonomi, intelligenza artificiale, robotica e propulsione, creando un sistema capace di sfruttare diverse modalità di locomozione in un unico pacchetto.
Aaron Ames, direttore di CAST, spiega: “I robot oggi possono volare, guidare o camminare. Ma come possiamo integrare queste diverse modalità di locomozione in un unico pacchetto, in modo da poter sfruttare al meglio i vantaggi di tutte queste tecnologie, mitigando al contempo gli svantaggi di ciascuna?“.
Il progetto X1 dimostra come l’integrazione multimodale possa trasformare robot singoli in sistemi versatili, in grado di adattarsi a diversi scenari senza perdere efficienza o precisione. Il concetto alla base di X1 è rendere i robot non solo autonomi ma collaborativi: invece di funzionare separatamente, il robot umanoide e il drone trasformabile lavorano come un unico sistema, ognuno con funzioni specifiche ma complementari.
Dimostrazione pratica sul campus: un’emergenza simulata
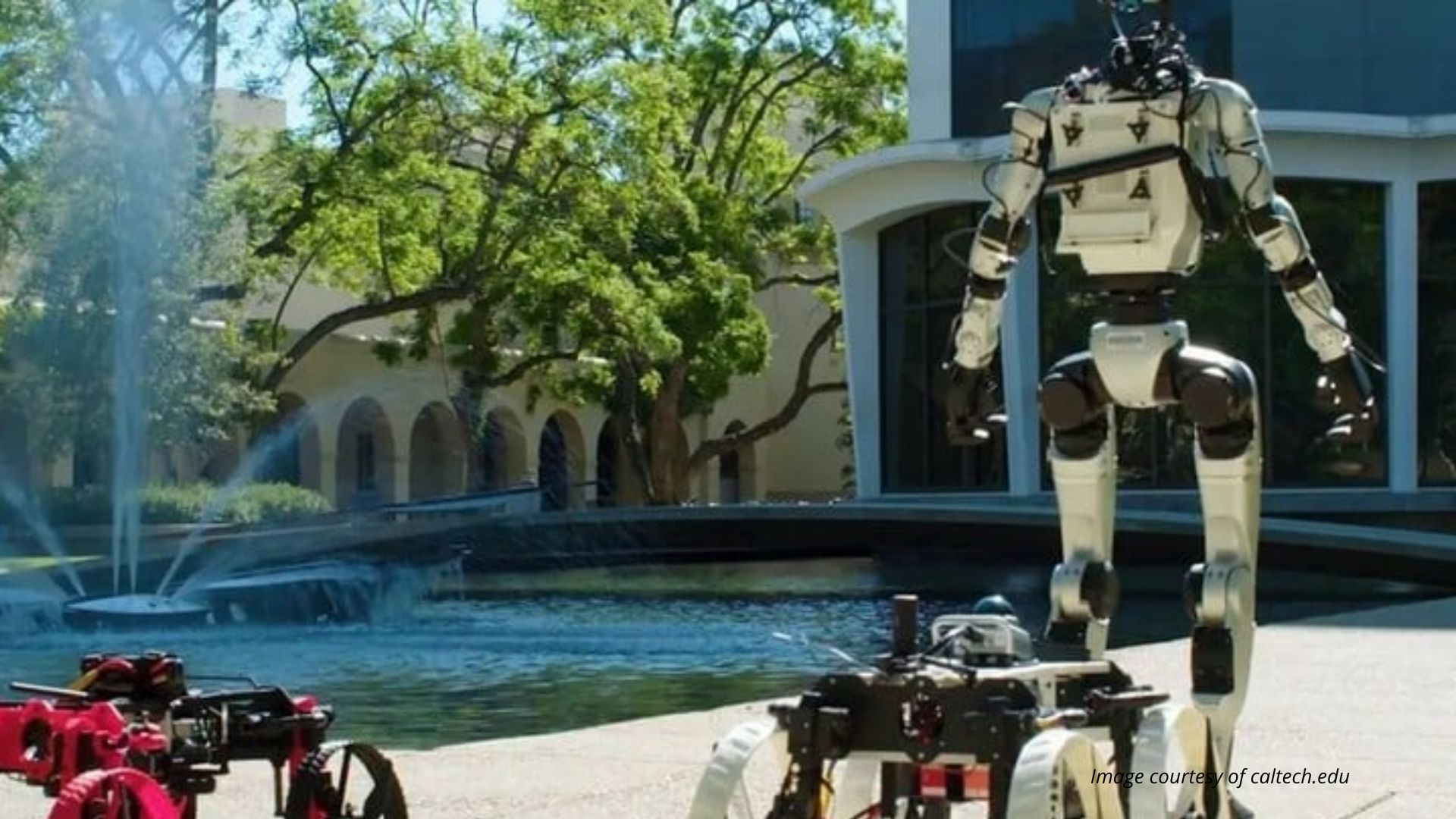
Per testare il sistema, il team ha condotto una dimostrazione sul campus di Caltech, simulando un’emergenza che richiedeva l’invio rapido di agenti autonomi. Il robot umanoide Unitree G1, opportunamente modificato, ha trasportato M4, il drone trasformabile che può sia volare sia guidare su ruote, come se fosse uno zaino.
La dimostrazione è iniziata nel Gates–Thomas Laboratory, con il robot umanoide che ha attraversato la Sherman Fairchild Library fino a raggiungere un punto elevato da cui M4 poteva essere lanciato. Una volta in volo, M4 ha cambiato modalità, passando dalla propulsione aerea a quella su ruote, continuando il percorso in maniera efficiente. Quando il drone ha incontrato il Turtle Pond, ha immediatamente riattivato la modalità volo per superare l’ostacolo, raggiungendo infine il sito dell’emergenza vicino a Caltech Hall. Il robot umanoide ha poi incontrato un secondo M4, completando così la missione.
Come sottolinea Mory Gharib, fondatore di CAST: “La sfida è come far lavorare insieme robot diversi in modo che, in pratica, diventino un unico sistema con funzionalità diverse. Con questa collaborazione, abbiamo trovato la soluzione perfetta“.
Tecnologia avanzata e autonomia intelligente
La forza del progetto risiede nella combinazione di competenze complementari. Il gruppo di Gharib ha sviluppato M4 e si occupa di robot volanti e terrestri, mentre il laboratorio Ames porta l’esperienza nella locomozione dei robot umanoidi, sviluppando algoritmi che permettono movimenti sicuri e adattativi. TII contribuisce con la tecnologia dei sensori e sistemi di autonomia per ambienti urbani, mentre Northeastern University supporta la progettazione dei robot trasformabili.
La nuova versione di M4 integra Saluki, un sistema di controllo di volo sicuro sviluppato da TII, che permette calcoli e autonomia in tempo reale. Claudio Tortorici, direttore del TII, ha evidenziato che l’autonomia del sistema nasce dall’integrazione di diversi sensori – lidar, telecamere e rilevatori di distanza – che permettono al robot di comprendere l’ambiente circostante e pianificare i propri movimenti.
Ames sottolinea che i robot umanoidi non si limitano a riprodurre movimenti umani: grazie a modelli matematici e tecniche di machine learning, “X1 può camminare; può camminare su diversi tipi di terreno; può salire e scendere le scale e, cosa importante, può camminare con oggetti come M4 sulla schiena“. Prossimo obiettivo è sviluppare robot in grado di eseguire azioni complesse senza dover replicare movimenti umani, rendendoli realmente efficaci in scenari concreti e non solo in laboratorio.

