Gli ingegneri della North Carolina State University hanno sviluppato un mini-robot che si muove autonomamente su fili sospesi utilizzando esclusivamente la luce infrarossa. Il piccolo dispositivo – dalla forma ad anello – è capace di trasportare carichi fino a dodici volte il proprio peso e affrontare pendenze fino a 80 gradi, senza motori, batterie o fonti di energia esterne.
Robotica morbida, dagli USA il mini-robot per trasportare carichi tra i cavi
Presentato in un articolo su Advanced Science, il robot è pensato come soluzione leggera ed efficiente per ispezioni aeree di linee elettriche, reti di sensori e operazioni di consegna in terreni pericolosi o inaccessibili.
“In precedenza abbiamo creato robot morbidi in grado di muoversi rapidamente attraverso l’acqua e attraverso il terreno solido, ma volevamo esplorare un design in grado di trasportare oggetti nell’aria attraverso lo spazio aperto“, ha spiegato Jie Yin, professore di ingegneria meccanica e aerospaziale e autore senior dello studio. “E ora abbiamo dimostrato che questo è possibile“.
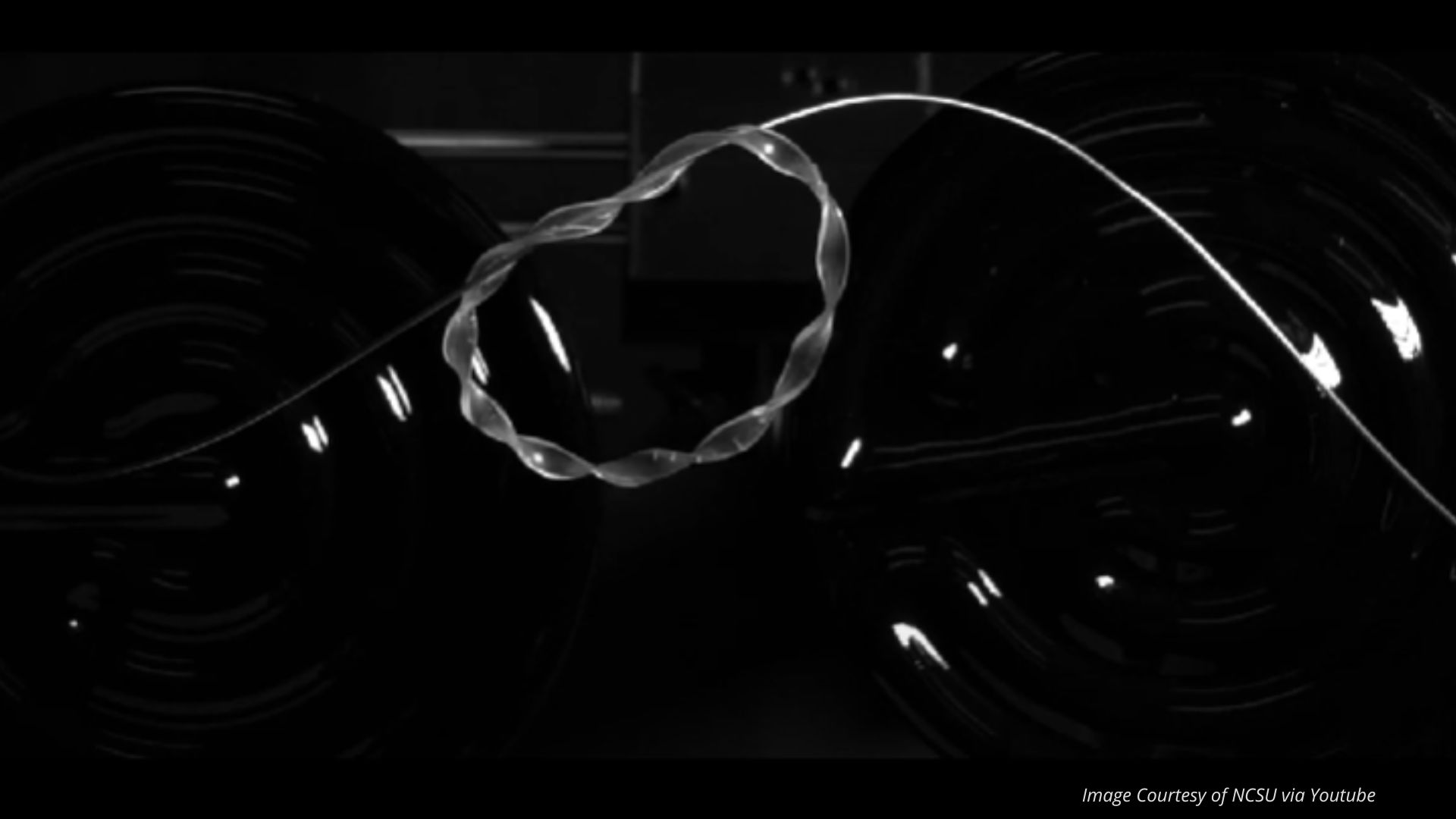
Il robot nasce come una semplice striscia di elastomero a cristalli liquidi, larga 4 millimetri. Dopo essere stata attorcigliata come una spirale, viene chiusa su sé stessa, formando un anello. Una volta avvolto attorno a un filo – da uno spessore simile a un capello umano a quello di una cannuccia – il robot può essere attivato da una lampada a infrarossi.
Il meccanismo è tanto semplice quanto ingegnoso: una parte della spirale si riscalda e si contrae sotto la luce, mentre l’altro lato, più freddo, si torce verso il calore. Questo ciclo continuo genera una rotazione a vite che spinge l’anello lungo il cavo, imitando il movimento di una vite in un dado. Nessun motore, nessuna alimentazione cablata: solo luce e termodinamica.
Nei test di laboratorio, il dispositivo ha superato ostacoli, trasportato carichi e scalato pendii estremi. Inoltre, la velocità e la direzione di marcia sono facilmente controllabili modulando l’accensione della luce infrarossa.
Oltre ai percorsi lineari, il robot ha mostrato notevoli capacità di adattamento a percorsi complessi: curve a S, spirali tridimensionali, cerchi chiusi. Questo tipo di mobilità apre le porte a molte applicazioni pratiche in ambienti reali. Il potenziale include l’ispezione delle linee elettriche – dove flotte di robot potrebbero cercare corrosioni o punti surriscaldati – o il monitoraggio agricolo, con sensori che scorrono su tralicci aerei. In scenari di emergenza, potrebbero persino trasportare medicinali o attrezzature leggere su cavi tesi sopra ponti danneggiati o aree pericolose.
Il team sta ora valutando come sostituire la luce infrarossa con altri stimoli, tra cui luce solare, campi magnetici o gradienti chimici, per permettere un utilizzo autonomo all’aperto, lontano da laboratori o lampade artificiali.

