In un futuro prossimo i microrobot saranno in grado di strisciare in spazi minuscoli e sfrecciare su terreni pericolosi, in modo da aiutare i soccorritori nel salvare le persone (ad esempio) intrappolate tra le macerie. Ma forse questo futuro è già qui, a giudicare dall’ultimo robot progettato dagli ingegneri della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS). Ispirato ai collemboli, questo microrobot supera i limiti dei suoi simili odierni, soprattutto per quanto riguarda la capacità di saltare.
Il microrobot di Harvard che salta 23 volte la sua lunghezza
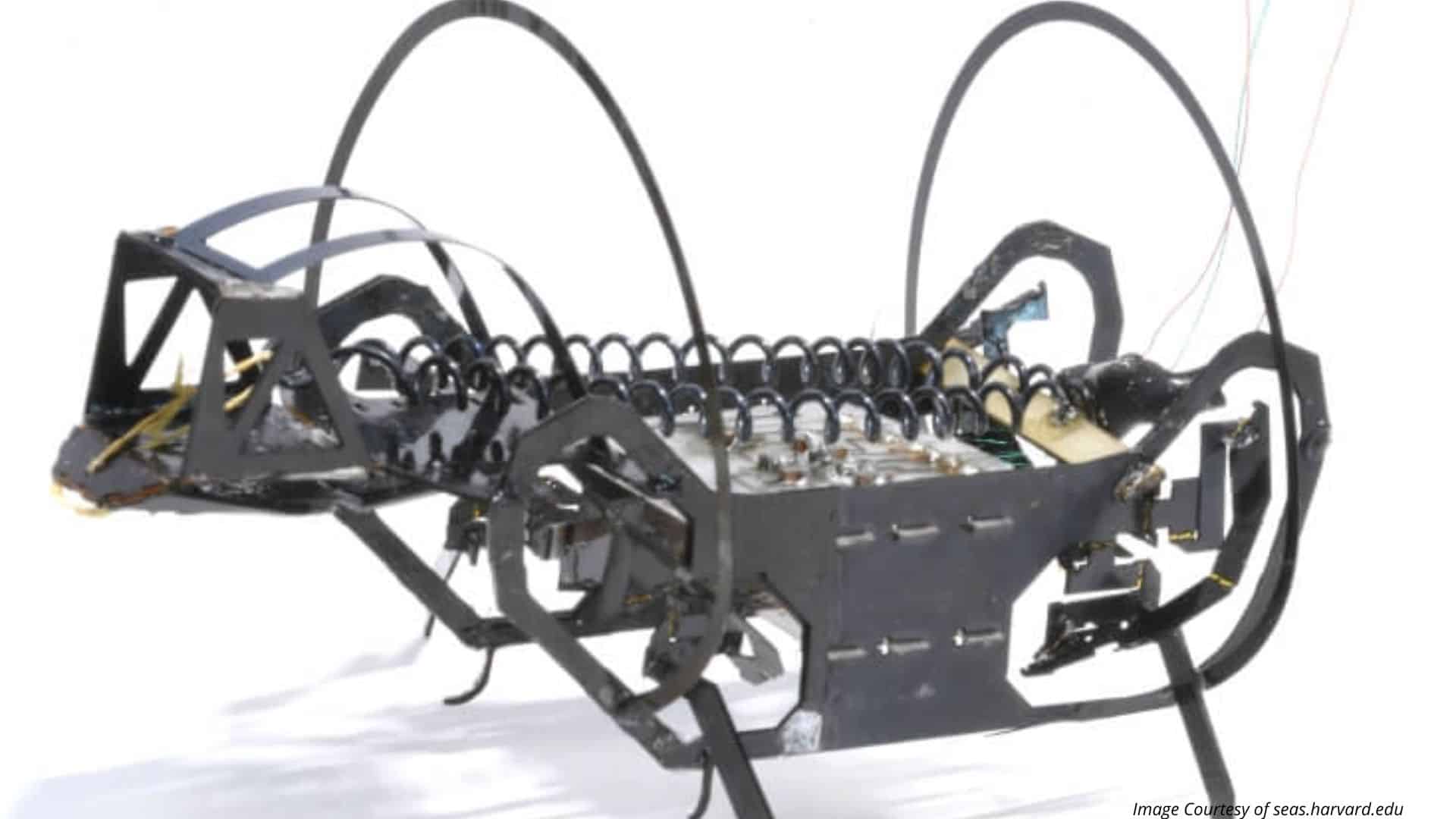
Il robot dell’Università di Harvard è un piccolo dispositivo grande quanto una graffetta, che può camminare, saltare, arrampicarsi, colpire e persino raccogliere oggetti. Un passo avanti significativo rispetto ai microrobot esistenti, che si muovono principalmente su superfici piane.
Come già accennato, il design e le capacità del robot si ispirano ai collemboli, piccoli insetti noti per la loro straordinaria abilità di compiere salti che superano di decine di volte la loro lunghezza corporea.
Ufficialmente non si tratta di un robot creato ex-novo. Come raccontano i ricercatori, questo microrobot è “una modifica dell’Harvard Ambulatory Microrobot (HAMR)“, se non la sua versione ottimizzata. I ricercatori lo hanno infatti dotato di “una furcula robotica, un’appendice biforcuta simile a una coda” che è presente sotto il corpo dei collemboli. Proprio questa furcula consente al robot di atterrare e spiccare il volo con grande agilità. Inoltre, il robot utilizza una tecnologia chiamata “latch-mediated spring actuation” che, simile a un catapulta, permette al robot di eseguire salti rapidi ed efficaci.
Grazie a queste soluzioni tecnologiche, il robot è in grado di effettuare salti che raggiungono i 1,4 metri, ovvero 23 volte la sua lunghezza, superando le performance di altri microrobot.
Versatilità in ambienti complessi
Le potenzialità di questo microrobot sono immense e si estendono ben oltre la semplice esplorazione scientifica. Immaginiamo microrobot in grado di operare in situazioni di emergenza, come nelle operazioni di ricerca e soccorso in scenari di catastrofi naturali, dove la loro abilità di saltare e arrampicarsi potrebbe consentire loro di accedere a luoghi inaccessibili per gli esseri umani.
“La capacità di camminare fornisce ai robot una mobilità precisa ed efficiente, ma comunque limitata quando si tratta di attraversare gli ostacoli“, ha detto il professor Robert J. Wood del SEAS. “E sebbene il salto permetta di superare gli ostacoli, come movimento è meno controllabile. Combinando invece queste due capacità, i robot potranno navigare in ambienti naturali e complessi“.
Inoltre, questi robot potrebbero essere utilizzati nell’agricoltura di precisione, dove la loro capacità di muoversi tra le piante e raccogliere dati sull’ambiente circostante potrebbe rivoluzionare il modo in cui monitoriamo la salute delle coltivazioni.

